|
 |
 |
 |
||
 |
 |
Home · About Us · Services · Portfolio · Job Opportunities · Contact |
|
||
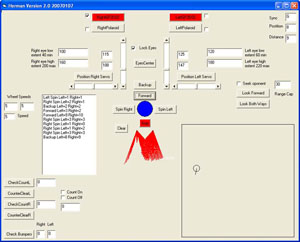
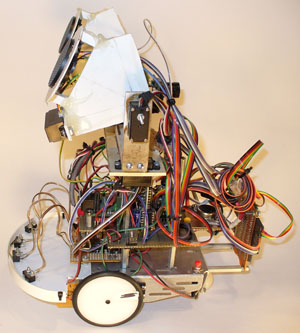
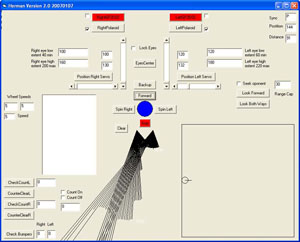
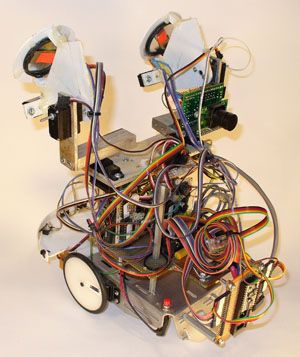
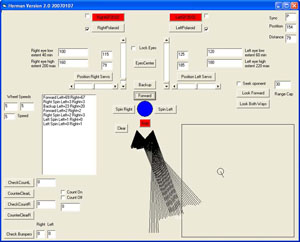
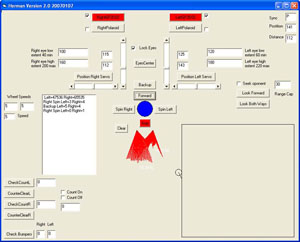
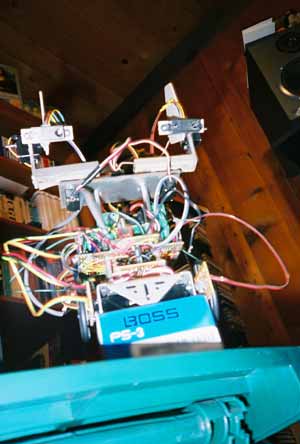
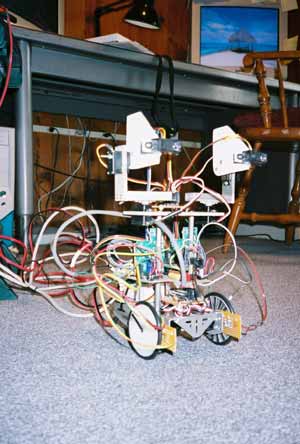
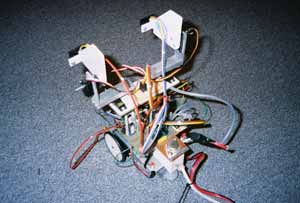
My Robotics HistoryI have been interested in robotics for as long as I can remember. I have the usual beginnings, taking radios, mixers, blenders and hair dryers apart to see how they work. I went on to work with radio controlled cars and airplanes for a while. For the most part though, I am a big fan of letting my creations exist without me. I have been building Robots since 1999, I started with some kits and then moved on to robots that I could program. (I have been working with computers since 1994 and I have always wanted to make code effect the outside world and visa versa.) I spent a while playing with the Basic Stamp BOE Bot, and got bored with the stupid thing getting stuck in the corner and only being able to traverse the shallowest carpeting. I thought it would be wise to move on to a more "Off Road" vehicle to handle the deep dark jungles of shag carpeting. I bought a couple of Bulldozer kits from The Robot Store and a couple of Motor Mind B units from Solution's Cubed. I also picked up a variety of great sensors that I have yet to really see the power of.After shorting out most of my circuitry and melting several components, I realized electronics is not my strong suite. I decided it was time for some intervention. It just so happened, that I had just been introduced to someone who could help me. Rob Trotta agreed to lend a helping hand and put together some of the schematics I had sketched up, with the proper resisters and caps! I have run into a few snags here and there and send great thanks to the folks at Net media, Solutions Cubed, Parallax, and countless others who have talked my robots off the ledge. As of now, I am working with some encoders from US Digital and a counter unit from Al Williams, trying to make a Dead reckoning system work. I have moved from wood to aluminum. I am working back and forth between Basic Stamps, Basic X and Basic Atom Micros. I am thinking about moving away from the Motor Mind B units. I had high hopes that they would cover all of the tasks necessary to build in Dead reckoning but I fear that without a second PIC processor to count the fast encoders I am using, the Motor Mind's just can't handle the task. I am looking into Living Machines "Descartes" for more on how they run their motors and count the wheel revolutions. Check back every once in a while I will be posting more pictures and code once I have something that isn't laced with Debug statements! 10-24-02: Just an update… I wish to send thanks to the folks at ARGNJ. For the longest time I feared that I was the only person in the tri-state area that cared about robotics. I recently found this group and realized that these guys are right in my backyard! There is talk of a meeting and some of the guys are talking about their robotics projects. It has inspired me to jump back in and get something working. I have spent the last week or so modifying the BOE bot chassis to fit the board that Rob built and much more. I set aside my US Digital encoders and started working on a simple version out of Mobile Robots Inspiration to Implementation, the first addition, I picked it up on a tour of MIT in 93. This version of the encoders uses some very small photoreflectors from Hamamatsu and a couple of resistors. I had some trouble with the encoder disks though. I picked up some sticker paper from Staples and printed a 90 segment wheel, I used Illustrator’s Pie graph function… I couldn’t get a reading off of the sticker stuck onto the BOE bot wheel though. I read the section in Mobile Robots again and saw that they used a few pieces of paper to give the reflector something to reflect off of. That still didn’t work… After playing with the pie graph and moving to an Excel graph with 30 segments and still not seeing a steady count per revolution, I decided to look into something that was a little more reflective… I cut my wheels out and then cut the white segments out entirely. I then peeled the backing off and stuck the encoder wheel to the shiny side of heavy duty aluminum foil, then with some double stick tape I stuck the aluminum foil/sticker wheel to another piece of sticker to give it some weight, then the whole arrangement was stuck to the wheel. With only 30 segments I get 15 cycles per revolution. I set up a program to stop the wheels after the counter reaches 15, I see a lot of over throw, about 50% of the time the wheel turns a little farther then one revolution per 15 count. I am sure with a better resolution I could get it pretty tight but with the way I made the wheels I think cutting more then 30 segments would drive me to drink! I also figure this a temporary solution until I get the frame built for the tank drive robot base, where I will definitely use the 256 count per revolution US Digital encoders… When I decided to use the BOE bot base for this cram session, I remembered that I would have to give up cycles to pulseout and wait for some time and then stop the motors and check the sensors and so on. One of the components I just happened to have at my disposal is a Mini SSC, I use it to pan and tilt the robots eyes, which will each house a Sharp GP2D02, a Polaroid 6500 unit, a Devantech SRF08, a CMUcam, and some photoresistors and other simple light and sound sensing equipment. I plugged my modified servos into the Mini SSC and set the position and sure enough they ran steady, leaving the Stamp to do something else. In the past week I have mounted my board to the BOE bot chassis, built and mounted the PAK VII board, built and mounted the Hamamatsu reflectors, mounted the pan tilt units for the two eyes, made a whole lot of cables and built a tether to the two serial lines for programming debugging and interfacing utility plus a power supply for hours of testing without those pesky battery problems. I am very excited to be moving on into the programming phase and will be keeping this page updated. I will have some photos of this slap happy do hickey probably early next week. 10-27-02: I took some pictures, this little guy really isn't very photogenic... I guess I need some white back drops and some better lights. I think I have more sensors to buy first though. For the most part over the last couple of days I have spent a lot of time playing with code. So far he can travel out a set number of legs of a journey, when he sees an obstacle he turns to the right. When he is on the last leg of the journey and sees an obstacle, he turns around and heads home, reading an array of directions that he created on the way out. Right now he always turns right when he sees an obstacle, so I have him always turning left on the way home. Tonight I plan on fixing that and adding another check when he sees an obstacle, I want him to turn his eyes out to the right and left and check to see which way has no obstacle. Then he will turn in the best direction and append the array with that direction. If there is nothing in either direction, he will go right, or left a choice from a random direction selector. Check out the code, it isn't quite as clean and nice as I would like it, but I am planning on moving to the BasicX chip again soon. I am trying to really max out the stamp so when I move up I see a change. I might even bypass the BasicX for something that will allow Object Oriented Basic. I see a bunch of spots where objects and functions would save a lot of code. 04-22-08 WHEW! I thought I was going to update this thing! Anyway... There have been loads of developments but I only have a few minutes to post some pictures, so let's start there and see what happens next... Since the pictures I have rebuilt his eyes, there are now three IR range finders as well as the Polaroid Ultra Sonic range finder. The CMU cams are also now facing forward...;-) The interface has come a long way from my original build. You can now independently control each eye's pan and tilt so you can look left and forward at the same time. There is also the small box on the bottom right which actually tracks the position in space based on the IR wheel counters. The red lines represent the IR sensors and the black the Polaroid sensors. Latest Great News!Special thanks to Ben, Rolan and Quentin for all the help with Serial communications from Mac OS X to a Basic Stamp. The final solution came not from Keyspan, but from reading the FAQ's and testing using the best thing yet! A Basic Stamp programming tool for Mac OS X! http://muratnkonar.com/otherstuff/macbs2. After playing with both of my USB to Serial converters I am able to talk serial via PHP running on an Apache server on my Mac G5 running OS X!Next thing is to clean up the Visual Basic interface and port it to PHP on the Mac. Next time I post I will have some pictures of Harvey, he is a domed robot that was originally built for the ARGNJ Joust competition. The competition didn't happen but my guess is Ed's CMU tricycle would have kicked Harvey's butt all over the table! 09-16-08 Herman is still under way. I have moved from a Basic Stamp to a Basic Atom 40. There were and still are many little things that need to be worked out! They say you can swap a Basic Stamp out with a Basic Atom but I don't think they really mean it...;-) Al Williams AWCE seems to not respond to folks in need of assistance with their PAK modules. I have tried calling, emailing, etc... about the fact that their code example for a Basic Stamp and PAK7 doesn't work at all on the Basic Atom. I was told by the folks at Basic Micro that I should get an oscilloscope and play with the ShiftIn/ShiftOut. I put it on my Christmas list... I have been working with the PICAXE chips a lot lately. I will probably build my own quadrate encoder counter with a PICAXE 08M, seems pretty straight forward. I am also working on two Halloween display pieces. One is an animated mask that responds to vocal tracks of an MP3. I am working on a simple amplifier (LM386) trying to get some clean scalable results. I am sure there are better/easier ways to do what I am trying to do, but in this case I think I am getting there slowly but surely...
|